Die do-Schleife ist das Gegenstück zu while-Schleife. Das heißt sie arbeitet fast genauso wie eine while-Schleife, nur mit einer Ausnahme: die Bedingung wird erst am Ende der Schleife geprüft wird. Dieser Schleifentyp wird auch als fußgesteuerte Schleife bezeichnet und durchläuft den Schleifenkörper wegen dieses Aufbaus in jeden Fall mindestens einmal.
Struktur der do-schleife
do // Schleifeneintritt { // Schleifenkörper }while (Bedingung); // Schleifenaustritt
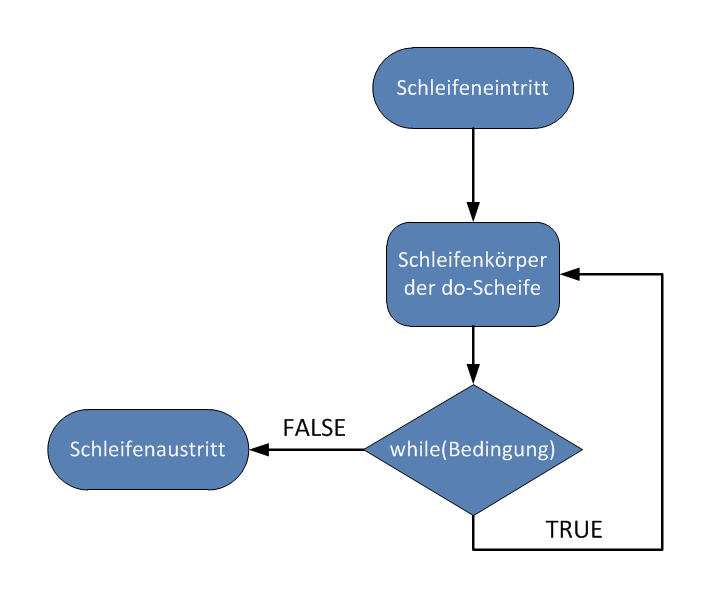
Flussdiagramm while Schleife
Das folgende Code-Beispiel zeigt, das der Schleifenkörper trotz der nicht erfüllten Bedingung für (x < 0), wegen seines fußgesteuerten Aufbaus dennoch einmal durchlaufen wird.
Code-Beispiel
1 2 3 4 5 6 7 8 | int x = 1; do{ // hier könnten noch viel mehr Anweisungen stehen. //mach das, was zwischen den geschweiften Klammern steht. Serial.println(" Der Schleifenkörper wurde soeben durchlaufen"); x++; } while (x < 0 ); Serial.println(x); |
Was passiert?
In Zeile 1 wird die Variable x initialisiert und erhält dabei den Wert 1.
Der Sketch setzt das Programm in Zeile 2 fort und tritt in die Schleife ein.
In Zeile 5 teilt uns der Sketch über den seriellen Monitor mit, dass gerade der Schleifenkörper durchlaufen wird.
In Zeile 6 wird der Wert von x durch den Inkrementoperator ++ um 1 erhöht. Der Wert von x ist nun 2
In Zeile 7 ist das Ende der Schleife erreicht. Hier wird mittels while(x < 0) geprüft, ob die Bedingung TRUE ist. In unserem Fall ist sie FALSE, denn x ist größer als 0. Ein erneutes Abarbeiten der Schleife wird dadurch verhindert.
Das Programm setzt die Verarbeitung in Zeile 8 mit der Ausgabe des aktuellen Wert von x fort.